您还没有登录,请您登录后再发表评论
CAN总线通信时目前使用最普片的一种总线!其通信协议CAN2.0B为主流协议。
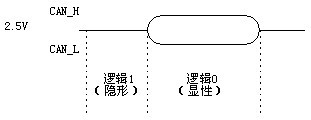
4. CAN总线协议栈,兼容OSI模型(物理,数据链路,网络,传输,会话,表示层,应用层); 5. CAN总线的电平信号,0-3.5V, 以2.5V为高低电平区分; 6. CAN传输距离和传输速率kbps的关系:位速率越快,传输距离越短;...
CAN 总线是一种串行通信协议,具有较高的通信速率的和较强的抗干扰能 力,可以作为现场总线应用于电磁噪声较大的场合。由于 CAN 总线本身只定义 ISO/OSI 模型中的第一层(物理层)和第二层(数据链路层),通常...
波仕CAN232P是世界上最小的、也是使用最简便的通用串口/CAN转换器、实现了USB、RS-232、RS-485、RS-422与CAN协议的透明转换。产品本身自己带通信设置功能。CAN232P是波仕新一代专利产品,谨防假冒!专利号:...
这是一个CAN2.0开发文档,描述了CAN协议。
CAN协议全解析 CAN协议全解析 CAN协议全解析 CAN协议全解析 CAN协议全解析 CAN协议全解析 CAN协议全解析 CAN协议全解析
对CAN协议的基本通信,采用LOOP方式,只需一个开发板即可进行测试。 测试MCU:STM32F103ZET6 测试工具:KEIL5
汽车CAN-BUS通讯协议:CAN通讯协议第一部分
但CAN协议只定义了模型的最下面两层:数据链路层和物理层,仅保证了节点间无差错的数据传输。CAN的应用层协议必须由CAN 用户自行定义,或采用一些国际组织制订的标准协议。应用最为广泛的是DeviceNet和CANopen,分别...
CAN总线协议规范,2.0版本(包括A、B两部分),已经是很全的一份资料了,带书签方便查阅。
CAN—Controller Area Network—是20世纪80年代初德国Bosch公司为解决现代汽车中众多控制单元、测试仪器之间的实时数据交换而开发的一种串行通信协议
@风离蓝 可以关注他的博客...CanFestival协议栈是用于嵌入式Canopen通信开发的常用协议源码之一,使用过的 不错,架构和逻辑层次比较清晰,因此方便开发人员进行后期应用扩展和源代码设计;
can J1939协议中文版第一部分《商用车控制系统局域网络(CAN)通信协议 第1部分:物理层 250千比特-秒 屏蔽双绞线》
《CAN2.0中文通信协议》 周立功翻译全中文,译自BOSCH公司 CAN 协议 V2.0。 供大家学习,参考。
分两个包,一个是老版,一个是包含了canfd的,都打包到一起了,想看哪个看哪个。ISO 11898-1 2015.12.15 ISO 11898-5-2007 2007-06-15 ISO 11898-1-2003
两本中文资料 ,一个是周立功的 can2.0 ,一本是can协议完全讲解手册 ,配合看,保证让你理解can2.0 .觉得好记得顶一下哦 .本来想免费的 .可是我资源分不多了,给个友情价 ,两本5分 .先看can协议完全手册,在看can2.0.
CAN总线协议的入门级资料,比较详尽的对CAN总线协议进行了描述。对于CAN总线的初学者来说,是一本非常好的资料,深入浅出,言简意赅。
CAN是控制器局域网络(Controller Area Network)的简称,是由研发和生产汽车电子产品著称的德国BOSCH公司开发,并最终成为国际标准(ISO11898)。是国际上应用最广泛的现场总线之一。本文档时关于CAN的应用层协议。
原始数据的获取:一般除了德系车以外,汽车上面一般都只有一条CAN总线,并且联到 了汽车的OBD口CAN引脚上,波特率500K的高速CAN,这个时候可以直接在OBD口读取CAN 数据。一般的德系车如大众,汽车上面有多达5-6条CAN...







相关推荐
CAN总线通信时目前使用最普片的一种总线!其通信协议CAN2.0B为主流协议。
4. CAN总线协议栈,兼容OSI模型(物理,数据链路,网络,传输,会话,表示层,应用层); 5. CAN总线的电平信号,0-3.5V, 以2.5V为高低电平区分; 6. CAN传输距离和传输速率kbps的关系:位速率越快,传输距离越短;...
CAN 总线是一种串行通信协议,具有较高的通信速率的和较强的抗干扰能 力,可以作为现场总线应用于电磁噪声较大的场合。由于 CAN 总线本身只定义 ISO/OSI 模型中的第一层(物理层)和第二层(数据链路层),通常...
波仕CAN232P是世界上最小的、也是使用最简便的通用串口/CAN转换器、实现了USB、RS-232、RS-485、RS-422与CAN协议的透明转换。产品本身自己带通信设置功能。CAN232P是波仕新一代专利产品,谨防假冒!专利号:...
这是一个CAN2.0开发文档,描述了CAN协议。
CAN协议全解析 CAN协议全解析 CAN协议全解析 CAN协议全解析 CAN协议全解析 CAN协议全解析 CAN协议全解析 CAN协议全解析
对CAN协议的基本通信,采用LOOP方式,只需一个开发板即可进行测试。 测试MCU:STM32F103ZET6 测试工具:KEIL5
汽车CAN-BUS通讯协议:CAN通讯协议第一部分
但CAN协议只定义了模型的最下面两层:数据链路层和物理层,仅保证了节点间无差错的数据传输。CAN的应用层协议必须由CAN 用户自行定义,或采用一些国际组织制订的标准协议。应用最为广泛的是DeviceNet和CANopen,分别...
CAN总线协议规范,2.0版本(包括A、B两部分),已经是很全的一份资料了,带书签方便查阅。
CAN—Controller Area Network—是20世纪80年代初德国Bosch公司为解决现代汽车中众多控制单元、测试仪器之间的实时数据交换而开发的一种串行通信协议
@风离蓝 可以关注他的博客...CanFestival协议栈是用于嵌入式Canopen通信开发的常用协议源码之一,使用过的 不错,架构和逻辑层次比较清晰,因此方便开发人员进行后期应用扩展和源代码设计;
can J1939协议中文版第一部分《商用车控制系统局域网络(CAN)通信协议 第1部分:物理层 250千比特-秒 屏蔽双绞线》
《CAN2.0中文通信协议》 周立功翻译全中文,译自BOSCH公司 CAN 协议 V2.0。 供大家学习,参考。
分两个包,一个是老版,一个是包含了canfd的,都打包到一起了,想看哪个看哪个。ISO 11898-1 2015.12.15 ISO 11898-5-2007 2007-06-15 ISO 11898-1-2003
两本中文资料 ,一个是周立功的 can2.0 ,一本是can协议完全讲解手册 ,配合看,保证让你理解can2.0 .觉得好记得顶一下哦 .本来想免费的 .可是我资源分不多了,给个友情价 ,两本5分 .先看can协议完全手册,在看can2.0.
CAN总线协议的入门级资料,比较详尽的对CAN总线协议进行了描述。对于CAN总线的初学者来说,是一本非常好的资料,深入浅出,言简意赅。
CAN是控制器局域网络(Controller Area Network)的简称,是由研发和生产汽车电子产品著称的德国BOSCH公司开发,并最终成为国际标准(ISO11898)。是国际上应用最广泛的现场总线之一。本文档时关于CAN的应用层协议。
原始数据的获取:一般除了德系车以外,汽车上面一般都只有一条CAN总线,并且联到 了汽车的OBD口CAN引脚上,波特率500K的高速CAN,这个时候可以直接在OBD口读取CAN 数据。一般的德系车如大众,汽车上面有多达5-6条CAN...